


.png)




{kind=link}
Электронный информационно-методический комплекс по робототехнике «Эврика»
Первый урок. Робот "Пятиминутка"
Итак, для начала изучим конструктор.
Перед вами уже находится коробка со стандартным набором Mindstorms Education EV3 LEGO. Сразу условно разделим все детали на несколько категорий. Перед вами находятся редставлены детали, называемые балками (те самые, продолговатые с отверстиями внутри них). Балки исполняют роль каркаса (скелета вашего робота).
Следующая группа деталей служит для соединения балок между собой, с блоком и датчиками. Детали, имеющие крестообразное сечение, называются осями (иногда штифтами) и служат для передачи вращения от моторов к колесам и шестерням. Детали, похожие на цилиндры (имеющие в сечении окружность) называются пинами (от англ. pin - шпилька),
Ну и, конечно же, движение в пространстве нашему роботу обеспечивают различные колеса и гусеницы, представленные в наборе.
В набор Lego mindstorms EV3 входят два больших мотора. Моторы выполняют роль мышц или силовых элементов нашего робота. Большие моторы, наиболее часто используются для передачи вращения на колеса, тем самым, обеспечивая движение робота. Можно сказать, что эти моторы выполняют ту же роль, что и ноги человека.
Основным элементом нашего конструктора является главный блок EV3. В этом корпусе заключен мозг нашего робота. Именно здесь выполняется программа, получающая информацию с датчиков, обрабатывающая её и передающая команды моторам.
На этом знакомство с конструктором пока приостановим, потому что только эти детали нам сегодня уже и пригодятся.
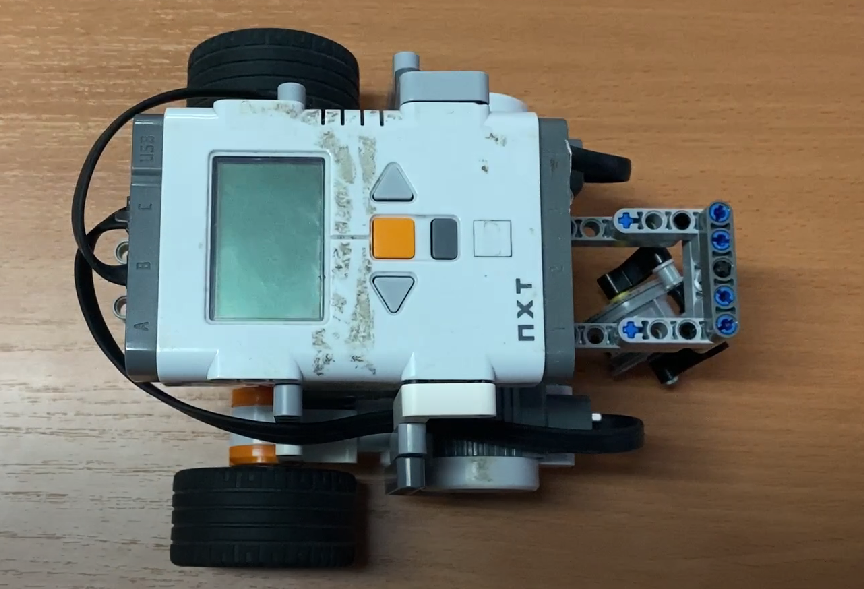
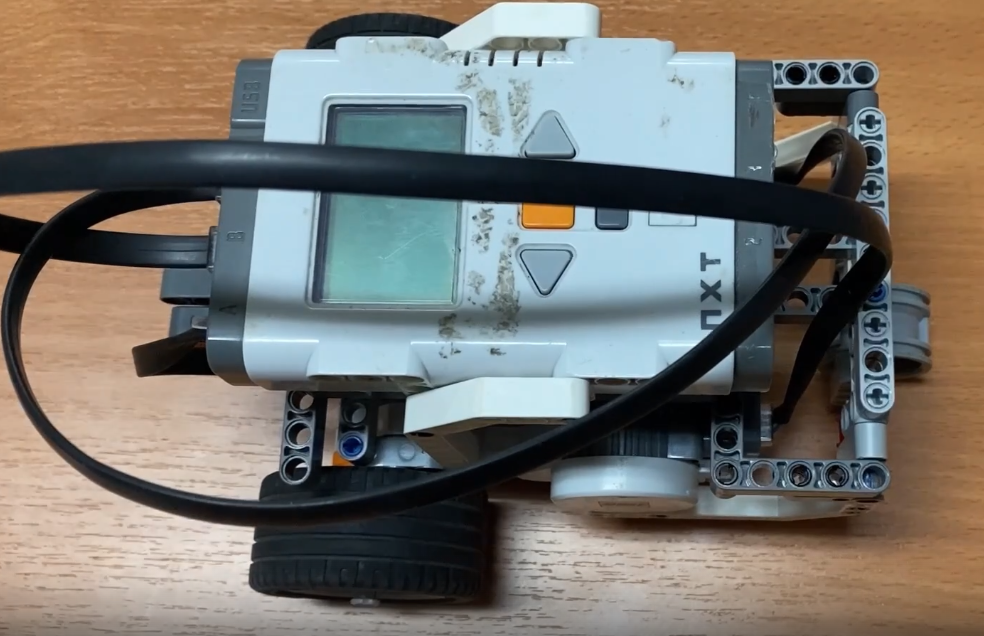
Конструкция, которая представлена ниже, может быть построена в течение примерно пяти минут. Подойдёт в качестве базовой машины-робота для любых испытательных задач или как изначальная сборка для различных процедур (добавление новых деталей, как для изменения внешего вида, так и для функциональной дальнейшей значимости), или в качестве отдельного концепта.
(Для воспроизведения видео нажмите на картинку)
.png)
Данный робот прочный и легко поворачивает на гладких полах.
Второй урок. Трёхколёсный бот
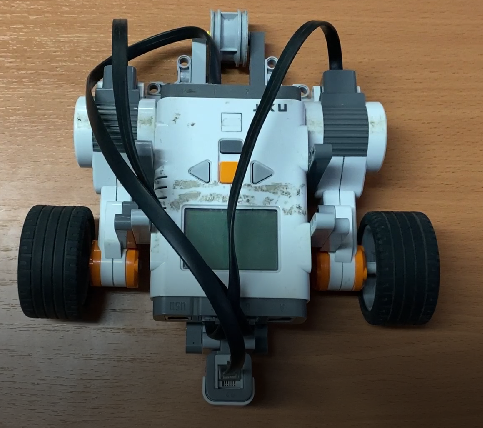
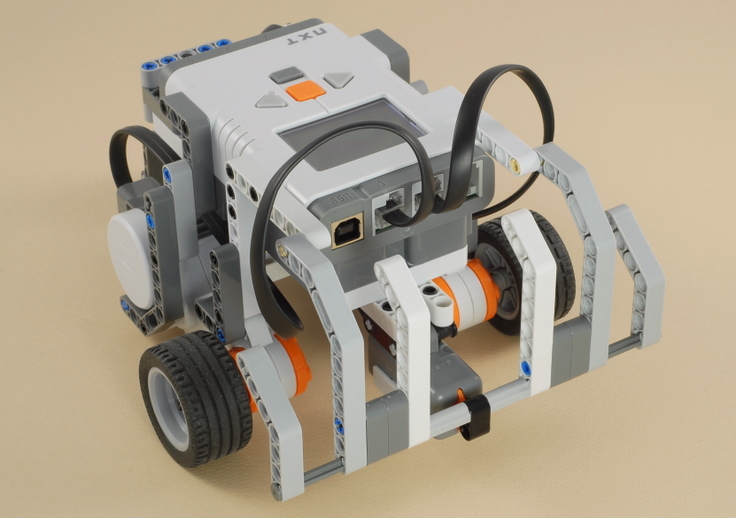
Робот, который представлен на этом уроке, использует два сервопривода и поворотное колесо. Такая конструкция позволяет роботу легко перемещаться по любой поверхности пола: и по ковру и по твёрдому покрытию. Этот вариант может питаться как от специализированной литевой аккумуляторной батареи NXT, так и от стандартных батареек AA.
Трёхколёсный бот может быть использован как простой автомобиль, умеющий поворачивать или в качестве базовой модели для других проектов. Так как робот может повернуть в любую сторону, то он также поможет нам понять, как программируется блок перемещения. В конце статьи имеются две простые базовые программы, которые демонстрируют различные виды поворотов с помощью кнопок блока.
Совет по строительству: Балансируйте вес!
При создании трёхколёсного робота, важно учитывать весовой баланс робота. Если Вы хотите хорошую поворачиваемость, то большая часть веса робота по-возможности должна быть над ведущими колесами. Не часть веса должна оставаться и на третьем колесе чтобы робот не опрокидывался.
Если больший вес у третьего колеса, робот может опрокинуться или ведущие колеса могут начать проскальзывать. Однако, если слишком большой вес попадает на ведущие колеса, то при движении назад робот может неожиданное... опрокинуться назад!
(Для воспроизведения видео нажмите на картинку)
Третий урок. Линейный ползун
Робот, который представлен на этом уроке, будет следовать по линии на полу с помощью датчика цвета NXT 2.0. В конце публикации Вы можете загрузить две программы. Одна из них представляет собой простой вариант. Назовём её программа "двух состояний". Она приводит зигзагообразные движения, что смотрится, конечно, страшновато. И более сложную программу "Пропорциональное движение" - это более плавное и быстрое следование по линии.
Программа № 1 "два состояния" - простая и позволяет роботу перемещаться по линии, но требует специальную калибровку датчика. Робот постоянно "подруливает" то влево, то вправо в зигзагообразном стиле. Запомните, что робота нужно запускать возле правого края линии!
Перед тем как использовать эту программу, рекомендуем сначала откалибровать значение яркости для использования в качестве "отсечки" между двумя состояниями (светлый и темный). Для этого вы можете использовать програмамму "Светометр". Порядок измерения: с помощью программы измеряете яркость по центру линии (темный цвет), на полу (яркий цвет), и выбираете среднее из них значение. Это и будет назваться отсечкой. Например, если программа показывает 20 единиц на линии и 40 единиц на полу, то в качестве порогового значения (отсечики) нужно выбрать 30 единиц.
Программа № 2 "пропорциональное движение" - более сложная. Она непрерывно регулирует мощность двигателей робота в зависимости от того, насколько далеко находится линия. Если робот находится немного от края линии, то используется небольшая мощность двигателей. Когда робот находится точно над правым краем линии, он будет двигаться прямо вперед на полной мощности. Это позволяет ему двигаться плавнее и быстрее, чем при работе программы "два состояния".
Кроме того, программа "пропорциональное движение" делает автоматическую "калибровка" в начале, когда робот сканирует линии и поверхность, чтобы определить самый темный и самый яркий участок, так что нет необходимости вручную определять пороговые значения. Для получения правильной калибровки, поставьте робота с датчиком непосредственно по середине линии.
Четвёртый урок. Исследователь
Миссия этого робота состоит в исследовании всего вокруг. Неважно где он находится: в Вашей комнате, дома, или где то на улице. Робот «видит» стены и другие препятствия, старается не соприкосать с ними. Подъезжая близко к препятствию робот поворачивает голову сначала налево, потом направо. Определяет, в каком направлении лучше всего ехать, поворачивается и едет. В случае, если он всё-таки случайно столкнётся с чем-то пердним бампером, то датчик нажатия сработает и робот остановится, подумает в какую сторону повернуть. И лишь потом поедет в верном направлении.
Перед запуском программы убедитесь, что "глаза" ультразвуковых датчиков указывают прямо перед собой. Это следует сделать для того, чтобы робот не путал где прямо, где лево, а где прямо!
Пятый урок. Робот с тремя двигателями
Базовый робот (платформа), рассматриваемый(ая) на этом уроке, использует два двигателя и поворотные колесо, чтобы легко перемещаться на любой поверхности. Будь то ковер или линолеум/ламинат. Третий мотор установлен низко в центре с некоторыми точками крепления для дополнительных механизмов, которые вы можете прикрепить к нему. Эта платформа надёжна, конструкция тщательно продумана, и Вы можете использовать её в качестве базы для других проектов.
К конструкции робота имеется возможность вставить ось для предотвращения поворота третьего колеса. В случае установки оси робот будет ехать прямо. Поворот при этом будет осуществляться двигателями.
Этот базовый робот прост в настройке и использовании и может быть использован в качестве базы для других проектов. Третий двигатель на низком уровне в передней (или задней части) робота может быть использован для крепления дополнительных механизмов. Обратите внимание, что Вы можете управлять роботом в любом направлении.
Шестой урок. Бот внедорожник
Изучение данного робота начинается только после изучения предыдущего урока. К роботу с тремя двигателями добавлятся дополнительные компоненты, в следсвии чего изменяются и задачи робота. Поэтому перейдём к сборке.
Пример для составления простой программы:
Один из блоков заставляет робота идти прямо, пока бот не упрётся бампером во что-нибудь, затем немного назад, поворачивает направо, затем едет назад (и далее программа повторяется). То есть, программа позволяет работать с датчиком касания, и принимать решение, если датчик срабатывает.
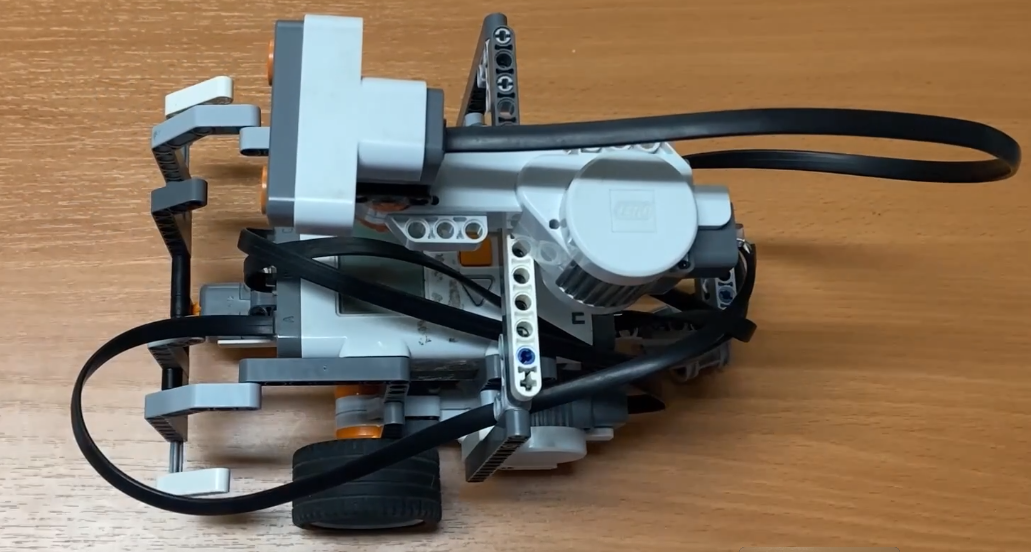
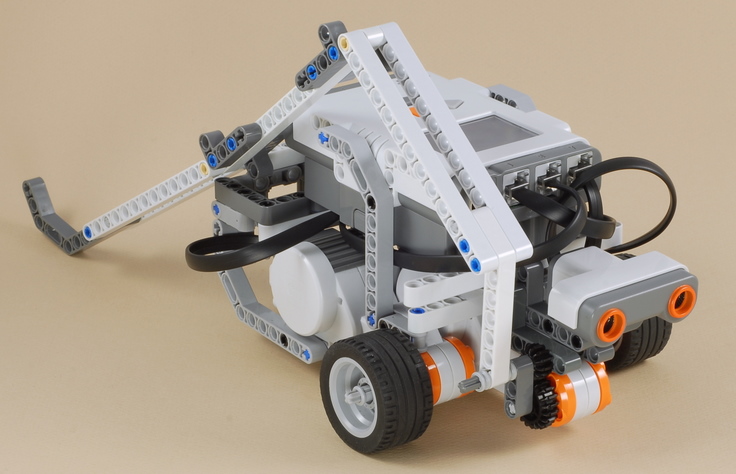
Седьмой урок. Нападающий коготь
Нападающий коготь - изучение данного урок - будет использовать ультразвуковой датчик для автоматического обнаружения цели, корректировать расстояние до цели, затем ударяет когтём, как хлыстом, чтобы попасть в цель.
Программируем нападающего когтя Программа позволяет роботу автоматически находить цель, а затем ударять по ней.
1. Поместите "Нападающий коготь" к цели достаточно близко для того, чтобы робот мог её увидеть. Желательно все опыты проводить на жёсткой поверхности, такой как линолеум, ковролин, паркет. Не рекомендуем использовать робота на ковре с густым воросом. Цель должна быть на расстоянии не более 60 см от робота.
2. Запустите программу clawstrike, отойдите от робота на шаг, чтобы робот не увидел Вас. В начале программа издаёт три предупреждающих сигнала, чтобы дать вам время отойти на достаточное расстояние.
3. Нападающий ноготь постарается найти и попасть в цель следующим образом:
3.1. Медленно поворачиваясь вокруг своей оси, стержень ищет мишени ультразвуковым датчиком;
3.2. Когда цель захвачена и находится в пределах досягаемости, робот подаёт звуковой сигнал;
3.3. В противном случае, робот снова начинает поворачиваться пока не захватит цель. При этом робот будет подавать другой звуковой сигнал;
3.4. Робот может отъехать назад, чтобы попытаться попасть прямо в центр мишени;
3.5. Ультразвуковой датчик измеряет расстояние до цели, затем двигается вперед или назад, чтобы настроить диапазон до 33 см;
3.6. Робот ударяет коготём как кнутом.